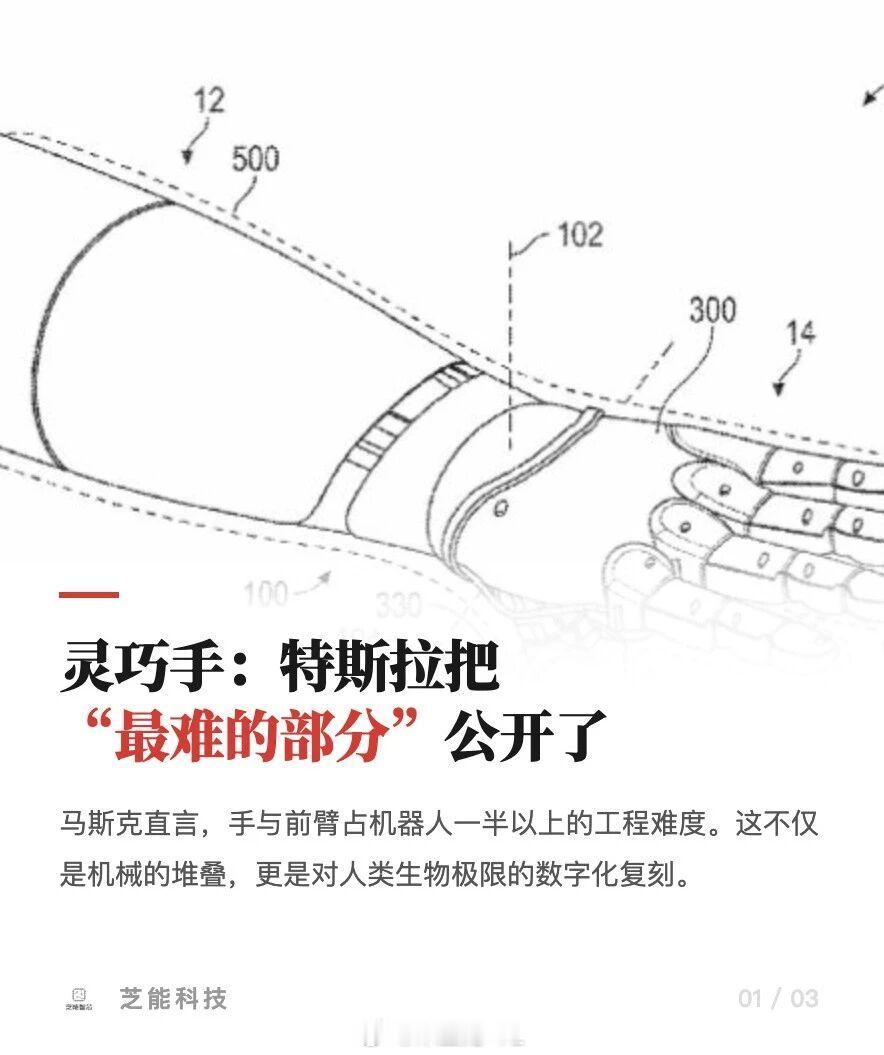
特斯拉Optimus的机械手的专利◎ WO 2026/080701:灵巧手主体(Mechanically Actuated Robotic Hand / Robotic Appendage),含25自由度整体架构(实际手部22 DoF + 腕部2 DoF)和保护/支撑装置(包括柔性复合构件保护缆线与关节)。
◎ WO 2026/080691:前臂(Robotic Forearm Assembly)。
◎ WO 2026/080690:腕关节(Wrist Joint for Robotic Hand)。
◎ WO 2026/080693:手指/关节组件(Joint Assembly for Robotic Appendage / 手指部分)。
◎ WO 2026/080687:缆线布设与路由(电缆通过腕部的过渡区管理)
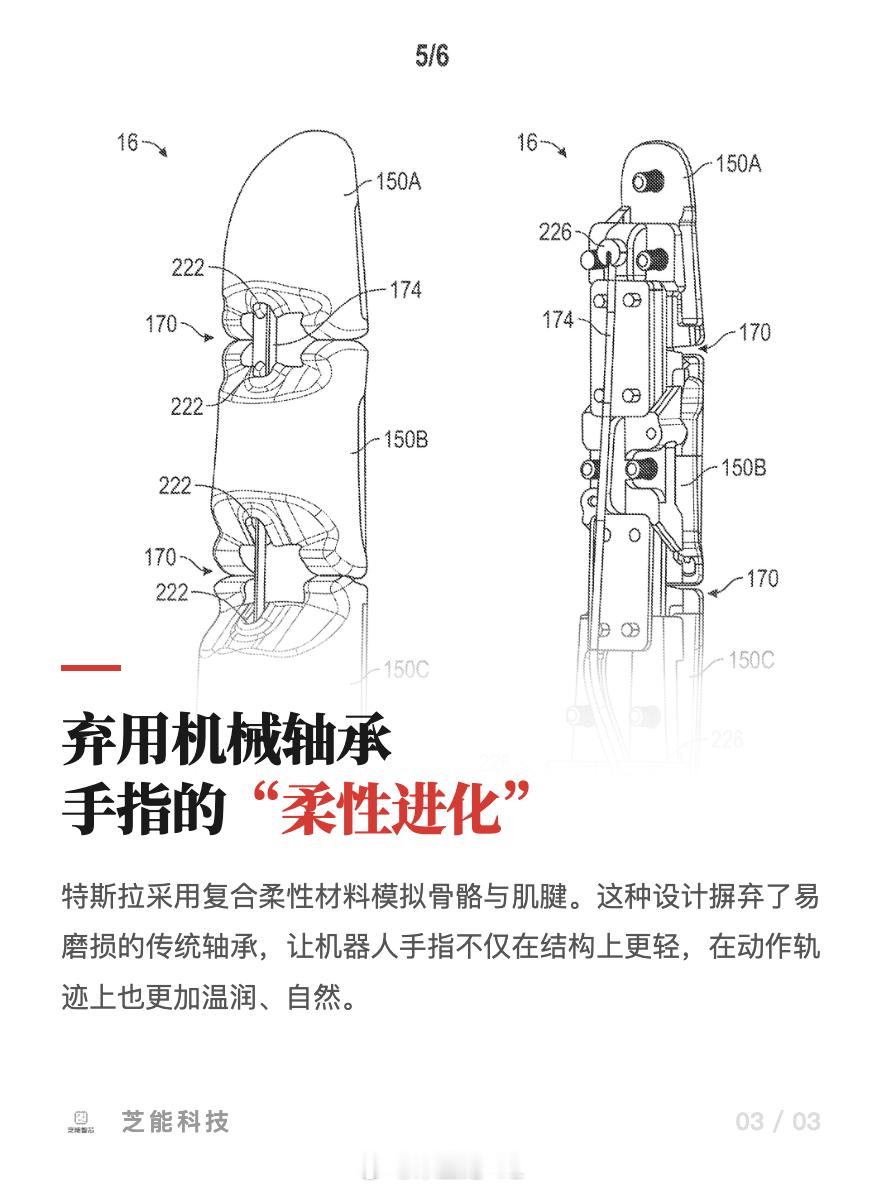
特斯拉的工程团队将执行器全部集成到了前臂位置,手臂配备25个线性执行器,其中23个专门负责手指动作,2个控制手腕,呈同心圆状环绕在中心旋转执行器周围。
手指采用肌腱驱动方式,每根手指由3根超薄柔性缆线牵引。手指具备约4个自由度,手腕则有2个自由度,整只手加起来共有22个自由度。
手腕处设计了一个创新的“路由器”结构,能把缆线从前臂侧面的横向堆叠,转换为手掌侧的纵向堆叠,这大大减少了多轴运动时缆线的拉伸、摩擦、扭矩和信号串扰。
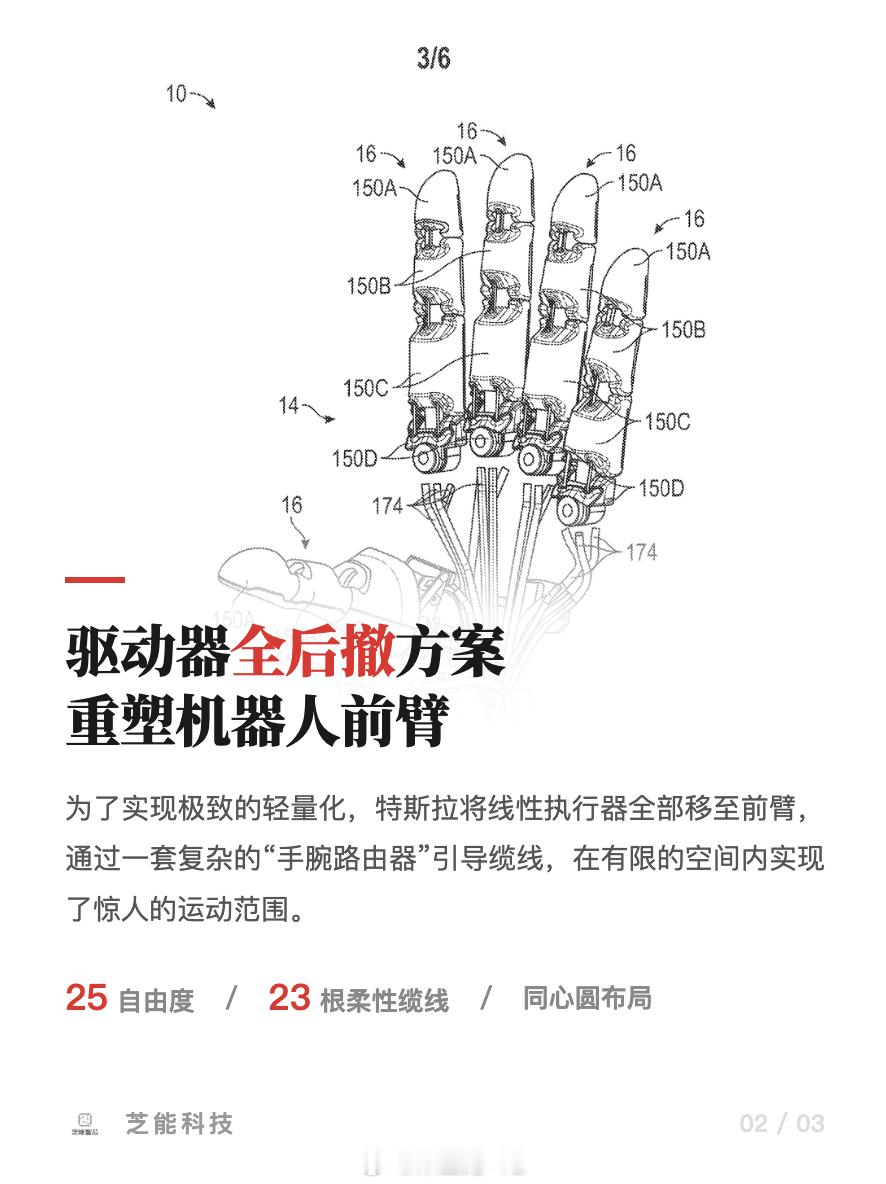
关节部分采用了滚动接触曲面和复合柔性构件,用弹性偏置替代了额外的伸展缆线,减少了主动缆线的数量、降低了各关节间的耦合效应,还让整体结构更轻量化、更耐用,同时也更适合大规模生产。
特斯拉机器人